Movement
POW sets top speed. FIN sets how quickly the Shell reaches it — at elite levels, full speed in under a second. Mass is inertia: heavier chassis accelerate slower and sustain a lower cruise velocity.
Every bounded move requires deceleration to a stop. Two velocity profiles:
Short moves never reach top speed. Accelerate, then immediately brake. Triangular profile.
Long moves reach cruise speed. Accelerate, sustain, decelerate. Trapezoidal profile.
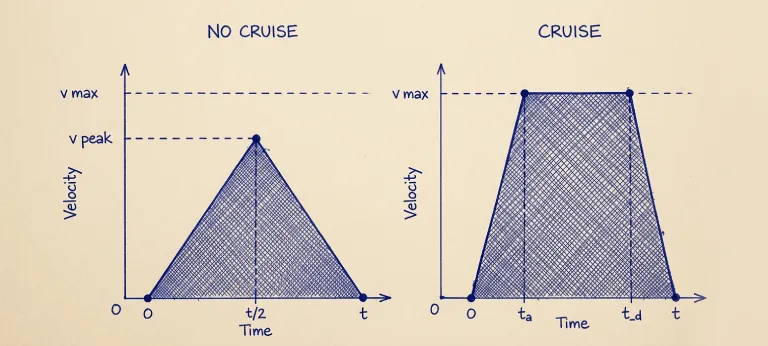 The area under each curve is the distance traveled.
The area under each curve is the distance traveled.
Fragmented movement costs more than continuous movement over the same distance. Each stop-and-start pays the acceleration-deceleration tax again. Two three-meter advances cost more AP than one six-meter advance.
Movement costs AP (one AP is one second). Time moving shifts capacitor position — time not spent recovering toward threshold.